EPS 系统说明
概要
汽车电动助力转向系统(EPS)英文全称 Electronic Power Steering,它利用伺服电机产生的动力协助驾车者进行动力转向,可为驾驶员提供准确、轻便、平顺、稳定的转向操纵力。
EPS 控制
EPS 控制单元根据转向扭矩信号和车速信号计算辅助扭矩,并激活电机帮助转向力矩。在重复极端转向力时,例如在车辆停止时持续转动方向盘或将转向保持在锁定位置(全右或左),为保护系统,EPS 控制单元会减小电机电流。 同时,当 EPS 控制单元从驾驶辅助系统接收到转向辅助请求时,EPS 控制单元帮助转向力矩。
方向盘回位控制
方向盘返回控制根据转向角和车速控制方向盘的回位速度。此控制辅助使方向盘回到中位。
运动自适应 EPS 控制
概要
运动自适应 EPS 控制配合 VSA 系统执行转向扭矩修正控制,以便在转向不稳时稳定车辆。 EPS 系统根据 VSA 调制器-控制单元计算的数据以及来自横摆速度信号和加速度信号的数据来确定车辆的状态。系统确定车辆状态异常时,EPS 控制单元根据车辆状态计算修正电流并修正转向扭矩。 VSA 系统出现故障时,停止移动自适应-EPS 控制。
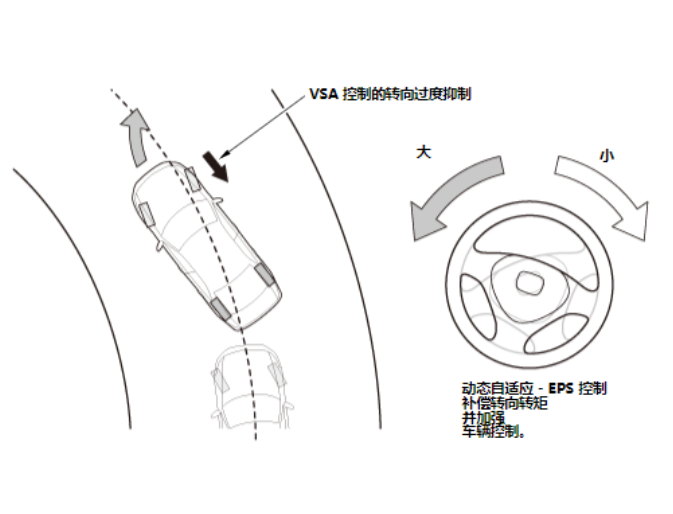
减轻转向过度控制
发生转向过度时,反向操控方向补偿转向扭矩,并通过 VSA 系统抑制转向过度增强车辆控制。
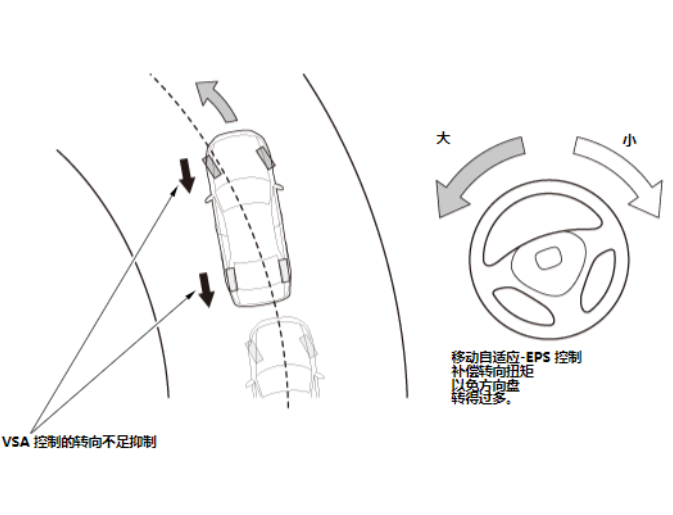
减轻转向不足控制
发生转向不足时,EPS 系统通过补偿转向扭矩来抑制转向不足,从而防止方向盘转动过大。此处之外,VSA 系统还会与 EPS 系统协作,以保持轮胎附着力,防止转向半径增大。
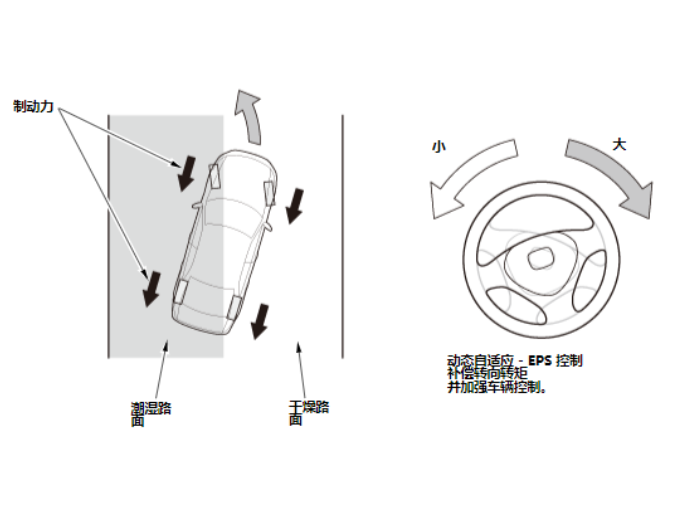
在不同的摩擦系数控制下稳定路面上的制动情况
在不平整路面制动时,如果车辆行为异常,可通过补偿扭矩来增强车辆控制。
转向角检测
EPS 控制单元从电机转角传感器值计算转向角。
转向角中间位置学习
当车辆转至 ON 模式时,EPS 控制单元学习转向角中间位置检测初始转向角。 转向角中间位置学习分为初始学习和常规学习。
初始学习
在驾驶过程中,转向角中间位置被清除后,初始学习将自动执行。 当 EPS 控制单元根据各个传感器信号判断车辆正在直行时,就会学习转向角中间位置。 有关学习程序的更多详细信息,请参考“转向角中间位置学习”。
只要进行了以下任一操作,进行转向角传感器中间位置清除:
- EPS 控制单元的电源电压大大降低,或 12 V 蓄电池端子与 12 V 蓄电池断开。
- 更换或拆下 EPS 电机/控制单元。
- 当 EPS 系统中发生无法计算转向角的故障时。
常规学习
车辆在行驶过程中,会产生正常磨损及车轮定位的改变,常规学习可修改中间位置的间隙。
使用 HDS 学习
使用 HDS,执行了 VSA 系统的 VSA 传感器中间位置记忆,则转向角中间位置将清除并重写。
失效保护
EPS 控制单元诊断并监控电机系统、转矩传感器系统、电源系统、通信系统和 CPU。检测到故障时,EPS 指示灯点亮并且该单元采取以下任一失效保护措施:
- 停止辅助
- 限制辅助
- EPS 辅助备用功能
EPS 辅助备用功能
EPS 辅助备用功能控制输出到 EPS 电机的电流,以便在以下目标部件发生故障时可以继续进行转向辅助。
控制目标部件
- 电机驱动电路
- EPS 电机转角传感器
- 电流传感器
- 转矩传感器
当转矩传感器中发生故障时,EPS 辅助备用功能使用转向角信号。因此,当通过断开 12 V 蓄电池端子来清除转向角中间位置时,EPS 辅助备用功能停止。当 EPS 辅助备用功能在转矩传感器故障以外的其他情况下运行时,转向辅助将继续,直到发生另一个故障。 由于 EPS 辅助备用功能在 EPS 系统故障期间继续进行转向辅助,因此可能会出现异常噪音、振动或转向力波动等。